此次組裝的 Otto 機器人腳不一樣了,組裝完成後的圖如下:

一、在組裝前,需要先檢查硬體是否有問題,準備好材料後,記得將四顆伺服馬達的槳給裝上去如下圖:

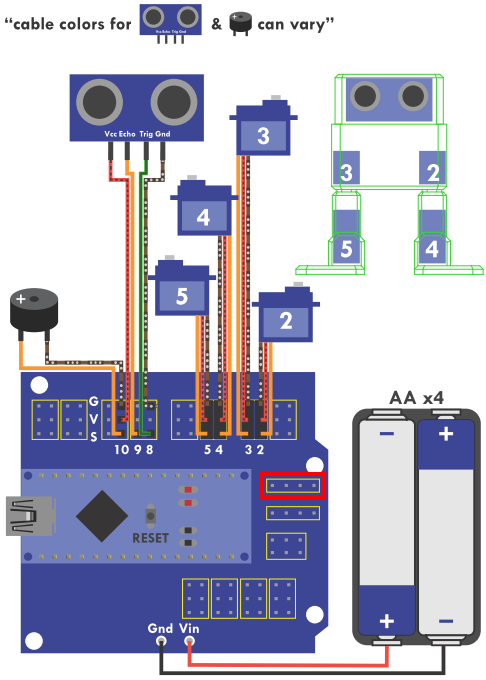
注意 Buzzer 有 + 號的那一頭為正極

二、根據官方的電路圖先將線路接好(依照下圖接線),
三、接著用官方提供的 Otto_avoid 程式來測試:
在上電後,先確定 Buzzer 有沒有聲音,再檢查四個伺服馬達有沒有動作,也要檢查伺服馬達是否有抖動的情況,接著用手擋住超音波看看 Buzzer 會不會發出聲音。
將四個伺服馬達給拆下,拆的時候用雙指捏住黑色的地方比較不會讓線受損,如下圖:

身體的部分有三角形的地方為前方,

四、要先將身體裡的伺服馬達先裝上去,拿伺服馬達內的螺絲,一長與一短,先放置在伺服馬達上

將伺服馬達鎖在身體,伺服馬達的線先任意放

五、接著要來調整腳的伺服馬達的角度,目標如下圖:

可使用 Otto_avoid 程式來作調整,Otto_avoid 程式在 Buzzer 開始發出聲音前,會將四個伺服馬達調到 90 度, Buzzer 發出聲音後,所有伺服馬達就會開始動作,所以可以配合 Nano 上的重置按鈕來調整伺服馬達。
六、調整好馬達後,將腿裝上身體,注意腳有兩個孔是朝身體前方的


此時可鎖兩根長螺絲在腿上,記得不要鎖太深

七、將腳裝上,在鎖上螺絲之前,可觀察腿的孔是否有對槳,以利鎖螺絲

鎖好兩個螺絲後,會類似像下圖

八、頭的部分要先裝上超音波模組

將線調整好,且接到 Arduino Nano 控制板上,就可以把 Nano 控制板裝到頭上了

將頭蓋上身體,就完成組裝。
沒有留言:
張貼留言