程式設計可以改變您的未來(Programming can change your future)。
雲林SONG 全名為雲林軟體工程(SOftware eNGineering),目標致力於軟體人才的培養並推廣開源軟體落實於資訊教育。程式設計的觀念是軟體產品的基礎,程式碼就像沙子一樣,要紮實,所建立出來的高塔才會穩固。本站也提供資訊教育相關的教學資源。
YunlinSONG stands for Yunlin SOftware eNGineering, offering tutorial for computer programming and promoting open-source software.
Teaching resources in information technology education are provided here.
If you like this post, please click the ads on the blog or buy me a coffee. Thank you very much.
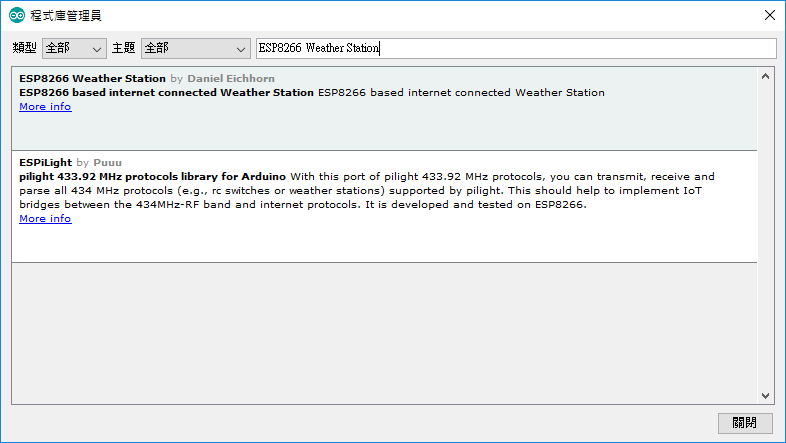
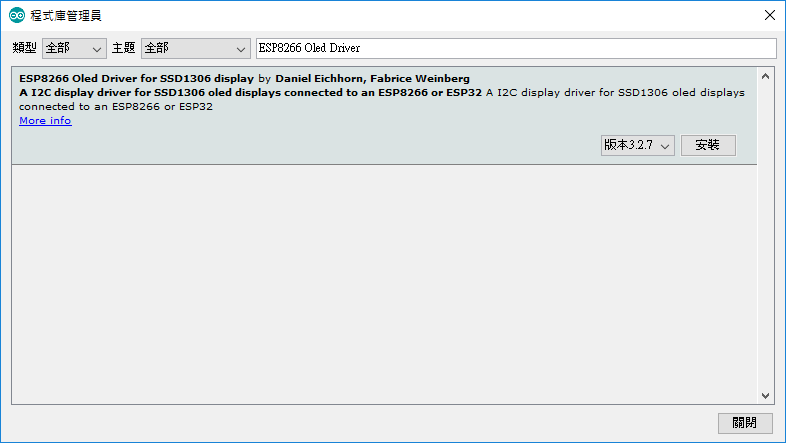
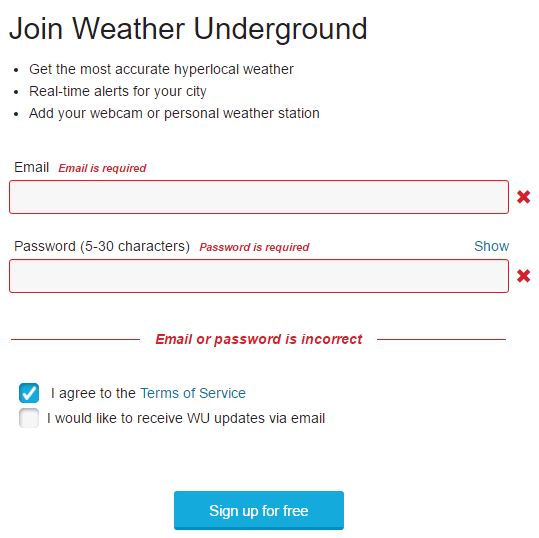
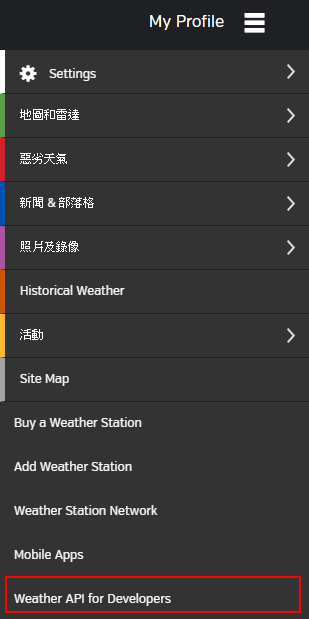
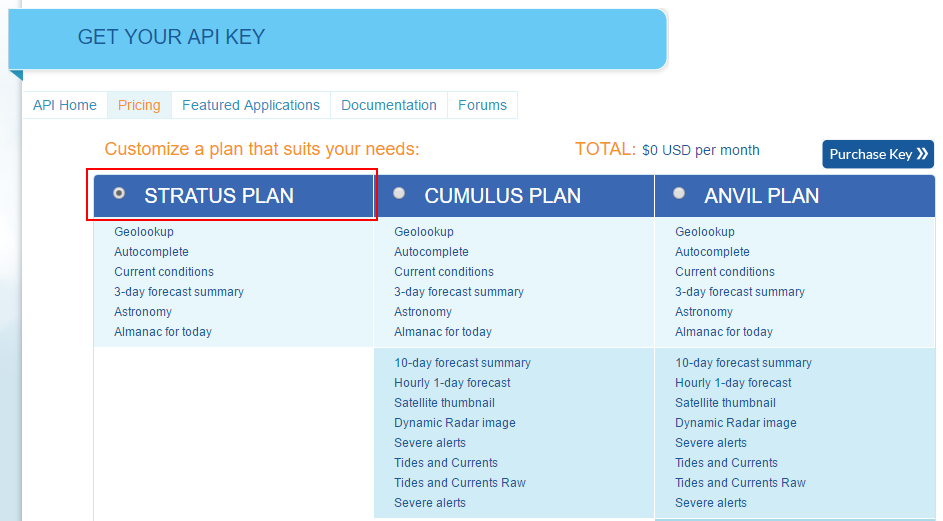
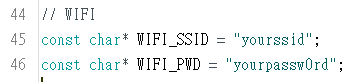
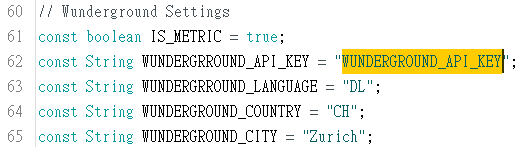
最近在Arduino ESP8266範例看到Weather Station的程式,就來做一個看看,此範例為使用https://www.wunderground.com當作氣象資料的來源,沒有使用到任何的感測器。
There is a sample code "WeatherStationDemo" in ESP8266 Weather Station library. This sample gets weather information from the website https://www.wunderground.com without using any sensors.
硬體材料(Materials):
1. NodeMcu 板子 x 1
2. Micro USB 連接線 x 1
3. 2000mAh 3.7 V 鋰電池(這是mBot用的電池)
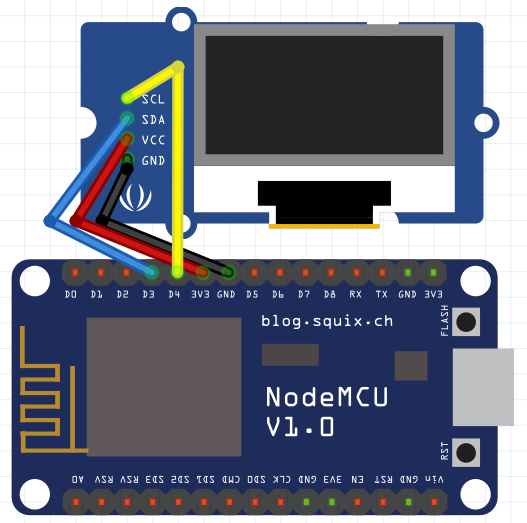
4. SSD1306 I2C 0.96 吋 OLED 顯示模組 x 1
硬體材料:
1. NodeMcu 板子 x 1
2. Micro USB 連接線 x 1
3. 5V 直流馬達 x 2
4. 公對公杜邦線 x 4
5. 母對母杜邦線 x 6
6. L9110S 馬達驅動板 x 1
7. 小車底盤 x 1
8. 小車輪子 x 2
9. 萬向輪 x 1
10. 緊固件 x 4
11. 長螺絲 x 4
12. 短螺絲 (長8根、短2根)
13. 螺帽 x 10
14. 行動電源 x 1
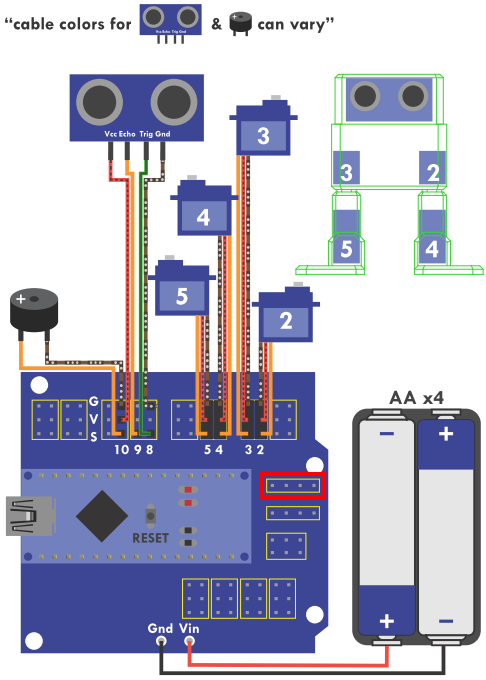
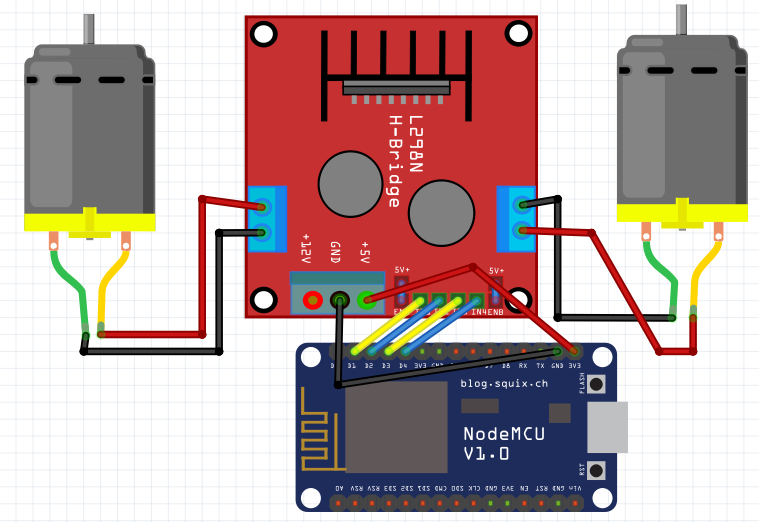
硬體電路:
上圖電路是以L298N來表示L9110S。 接線對應腳位:
L9110S馬達驅動板
B-1A 接 NodeMcu D2
B-1B 接 NodeMcu D1
A-1A 接 NodeMcu D4
A-1B 接 NodeMcu D3
VCC 接 NodeMcu 3.3V
GND 接 NodeMcu GND
完成圖:
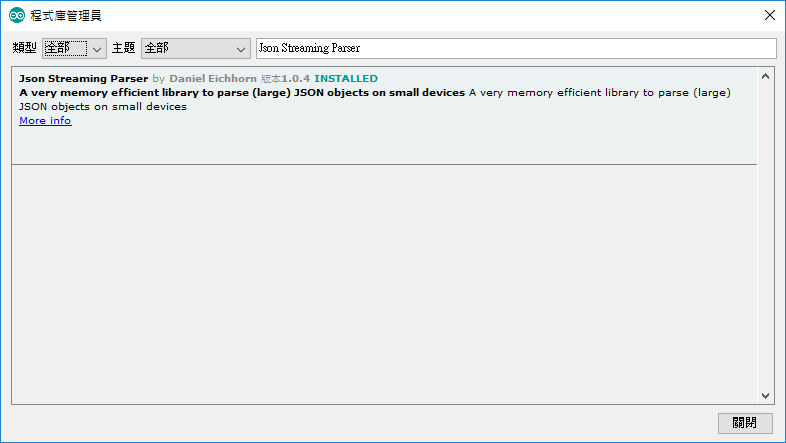
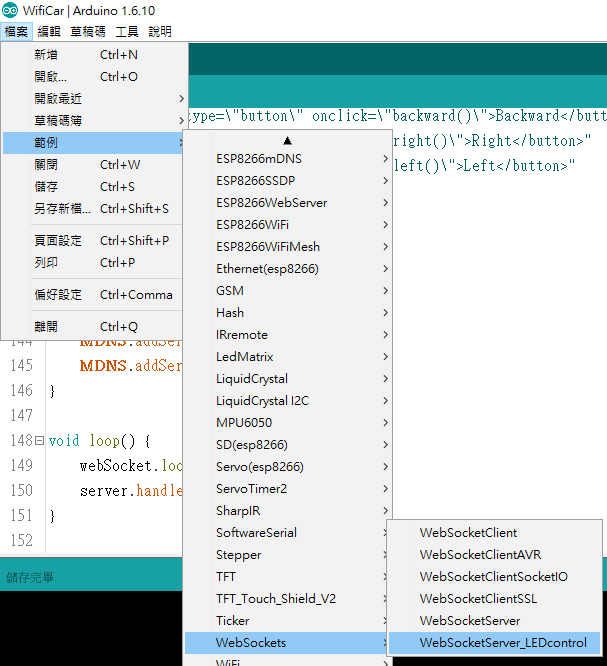
Arduino IDE 程式:
先安裝Websocket程式庫,筆者是用 Markus Sattler 的版本