
用 NodeMcu 製作 Wifi 自走車 ( A Wi-Fi Access Point Car )
NodeMcu上的ESP8266本身有SoftAP的功能,可以拿來當成Wifi基地台來用(本文沒用到網際網路),所以我們來製作一個可以透過手機上的Wifi來控制小車吧。
硬體材料:
1. NodeMcu 板子 x 1
2. Micro USB 連接線 x 1
3. 5V 直流馬達 x 2
4. 公對公杜邦線 x 4
5. 母對母杜邦線 x 6
6. L9110S 馬達驅動板 x 1
7. 小車底盤 x 1
8. 小車輪子 x 2
9. 萬向輪 x 1
10. 緊固件 x 4
11. 長螺絲 x 4
12. 短螺絲 (長8根、短2根)
13. 螺帽 x 10
14. 行動電源 x 1
硬體電路:
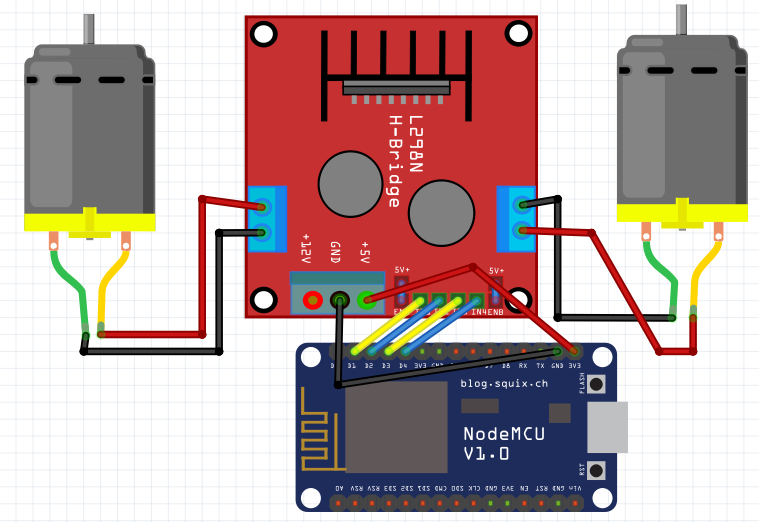
上圖電路是以L298N來表示L9110S。
接線對應腳位:
完成圖:

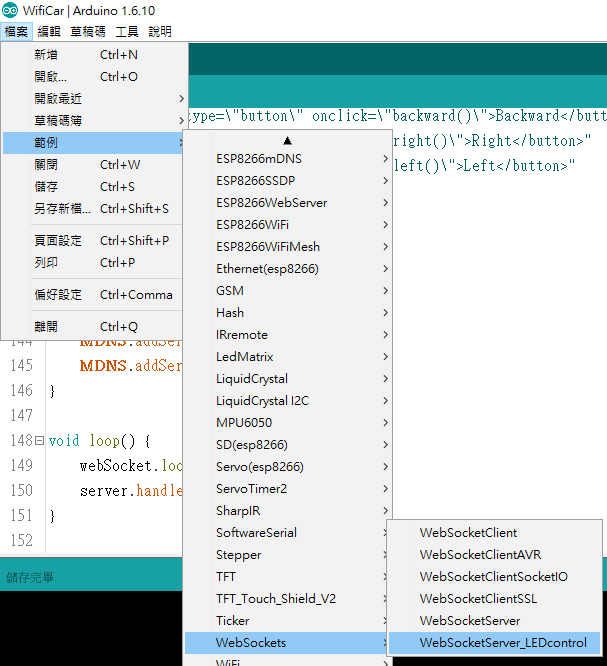
Arduino IDE 程式:
先安裝Websocket程式庫,筆者是用 Markus Sattler 的版本

筆者是修改此程式庫的範例:WebSocketServer_LEDcontrol
程式碼:
完成後就可以使用手機或電腦上的瀏覽器(需有支援Websocket)連上NodeMcu的IP位址,就可以網頁控制了,而且可多台控制喔。
示範影片:
延伸的應用:
硬體材料:
1. NodeMcu 板子 x 1
2. Micro USB 連接線 x 1
3. 5V 直流馬達 x 2
4. 公對公杜邦線 x 4
5. 母對母杜邦線 x 6
6. L9110S 馬達驅動板 x 1
7. 小車底盤 x 1
8. 小車輪子 x 2
9. 萬向輪 x 1
10. 緊固件 x 4
11. 長螺絲 x 4
12. 短螺絲 (長8根、短2根)
13. 螺帽 x 10
14. 行動電源 x 1
硬體電路:
上圖電路是以L298N來表示L9110S。
接線對應腳位:
L9110S馬達驅動板
- B-1A 接 NodeMcu D2
- B-1B 接 NodeMcu D1
- A-1A 接 NodeMcu D4
- A-1B 接 NodeMcu D3
- VCC 接 NodeMcu 3.3V
- GND 接 NodeMcu GND
完成圖:
Arduino IDE 程式:
先安裝Websocket程式庫,筆者是用 Markus Sattler 的版本
筆者是修改此程式庫的範例:WebSocketServer_LEDcontrol
程式碼:
完成後就可以使用手機或電腦上的瀏覽器(需有支援Websocket)連上NodeMcu的IP位址,就可以網頁控制了,而且可多台控制喔。
延伸的應用:
製作球形機器人,可參考以Arduino 打造球形機器人一文。
若您覺得文章寫得不錯,請點選文章上的廣告,來支持小編,謝謝。


留言
是NodeMCU 1.0(ESP-12E Module)嗎??